近日,清华大学计图(Jittor)团队提出了一种针对三角网格的卷积神经网络,在两个网格分类数据集上首次取得100%正确率,在其他多个几何学习任务中,性能显著超过现有方法。
尤为重要的是,这种基于细分表示的网格卷积神经网络的提出,使得VGG、ResNet和DeepLabV3+等二维图像的骨干网络模型可以方便地应用到三维模型的学习上,从而突破了二维图像和三维模型在深度学习上的壁垒,将极大地促进三维视觉、虚拟现实、智慧城市和无人驾驶等领域的发展。
Part 1
三角网格上的卷积网络
三维几何学习是计算机视觉与图形学中的一个重要研究方向,基于三维体素、点云、网格(mesh)等数据表示,学习物体的几何形状特征。其中,网格广泛应用于建模、渲染、3D打印等。因为网格数据较为复杂,包含点、边、面三种基本元素,缺乏规则的结构与层次化的表示,因此也更具挑战。
近日,清华大学Jittor团队在arXiv发布了论文“Subdivision-Based Mesh Convolution Networks”,提出了一种基于细分结构的网格卷积网络 SubdivNet。该方法首先将输入网格进行重网格化(remesh),构造细分结构,得到一般网格的多分辨率表示,并提出了直观灵活的面片卷积方法、上/下采样方法,并将成熟的图像网络架构迁移到三维几何学习中。
论文链接:
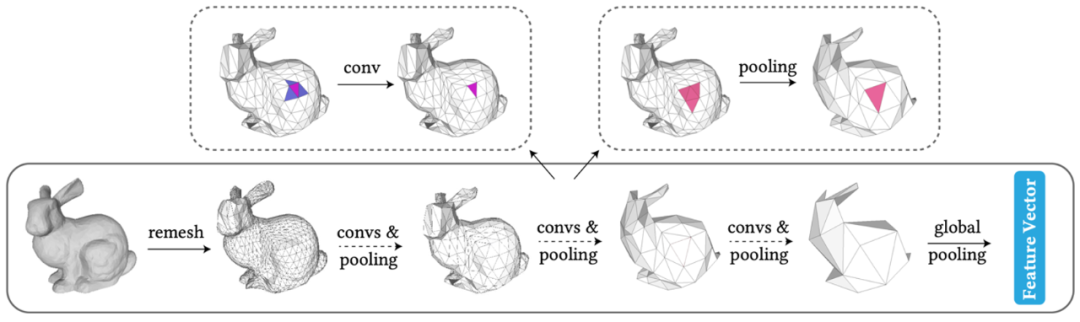
图1 SubdivNet的流程图
Part2****
面片卷积与上下采样
以往的网格深度学习方法将特征存储在点或者边上,但是点的度数不固定,边的卷积不灵活。该论文提出了一种在面片上的网格卷积方法,充分利用了每个面片与三个面片相邻的规则性质。基于这一规则性质,Jittor团队进一步依据面片之间的距离,设计了多种不同的卷积模式。
从图2可以看到,这种面片上的网格卷积方法,直观且灵活,有规律,可支持指定卷积核大小、步长、空洞等参数,很类似于图像的情形。图中,k为卷积核大小,d为空洞长度;其中a)为三角面片卷积,b)对应的二维图像卷积,c)为卷积中可能出现的重复访问,d)为更复杂的卷积示例。
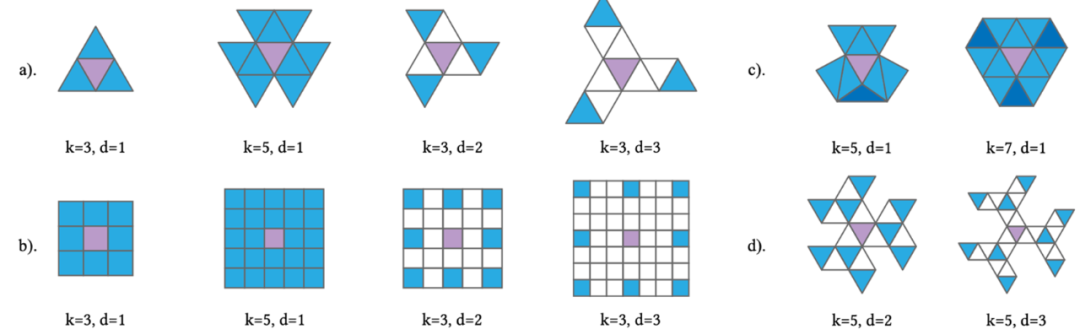
图2 三角网格上的卷积示意图
由于三维数据格式中的面片顺序不固定,SubdivNet在计算卷积结果时,通过取邻域均值、差分均值等方式,使得计算结果与面片顺序无关,满足排列不变性。图3给出了卷积的定义及其每项的含义。
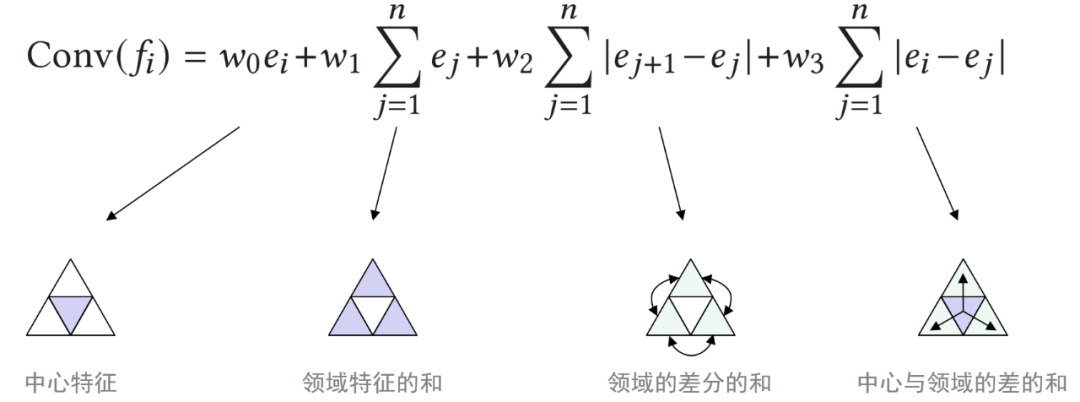
图3 卷积的定义及其每项的含义
在进行上下采样时,该方法受到传统的Loop细分曲面建模的启发,构造了一种基于细分结构的上下采样方法。如图4a)所示,细分曲面建模对面片进行“一分四”的面片分裂,使得三维模型逐渐变得光滑。
该论文首先将网格进行重网格化,使其面片具有细分连接结构,从而可以进行“四合一”的面片合并,从高分辨率转为低分辨率,实现面片特征的pooling操作,如图4b)所示。上采样时,同样对面片进行“一分四”的分裂。这样定义上下采样方式是规则且均匀的,还可以实现双线性插值等需求。
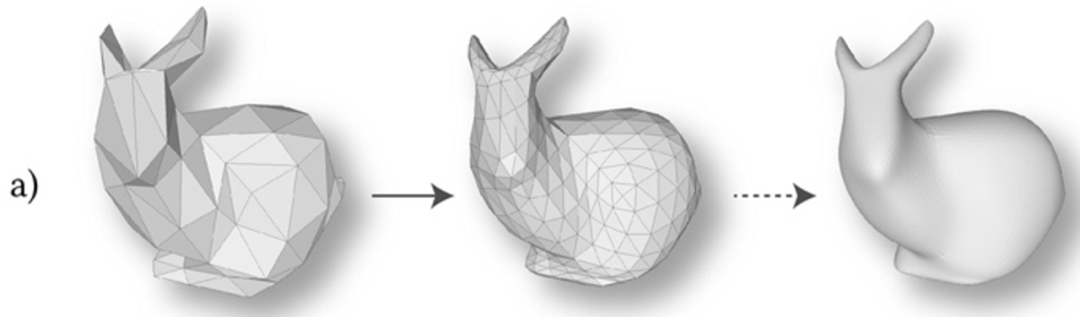
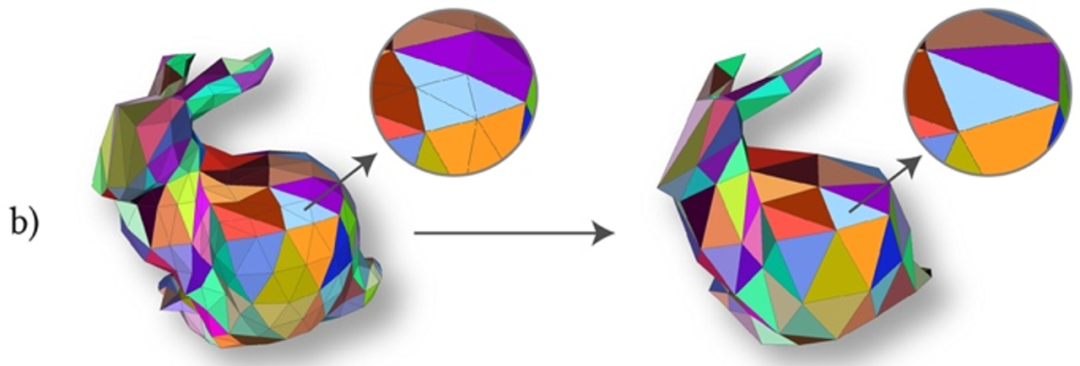
图4 细分曲面的示意图
由于卷积和上下采样规则且灵活,Jittor团队实现了VGG、ResNet和DeepLabV3+等网络架构,在三维网格模型的实验中取得了显著的效果。
该工作由清华大学的深度学习框架Jittor实现,Jittor框架提供了高效的重索引算子,无需额外的C++代码即可实现邻域索引;并且在同等网格面片数量下,SubdivNet的速度可达以往方法[2]的20多倍。
GitHub开源地址为:
Part 3
实验结果
SubdivNet在多种应用的进行了实验,展示了其在几何学习上的优势。更多的消融实验可以阅读原论文。
1. 网格分类
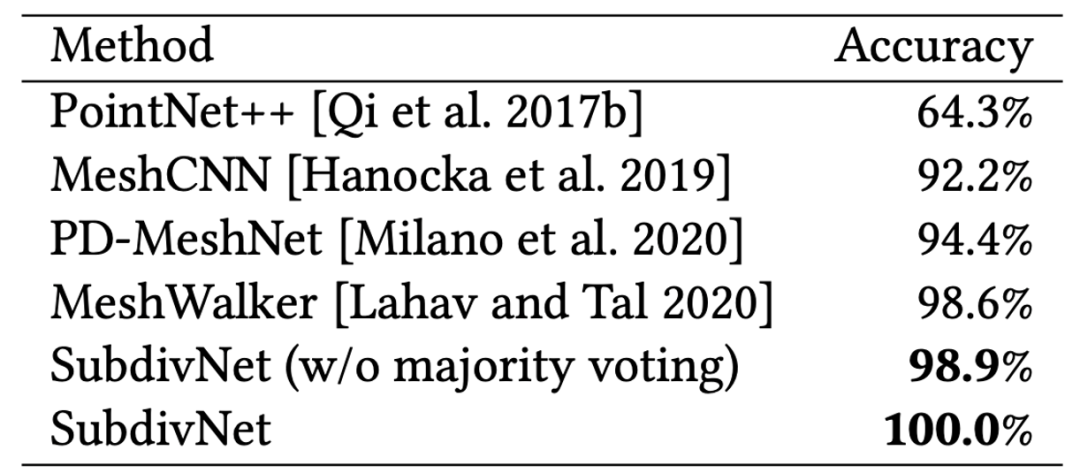
SubdivNet在三个网格分类数据集中进行了实验比较,如表1和表2所示。其中,在SHREC11和Cube Engraving两个数据集上首次达到了100%的分类正确率。
表1 在SHREC11数据集上的分类精度
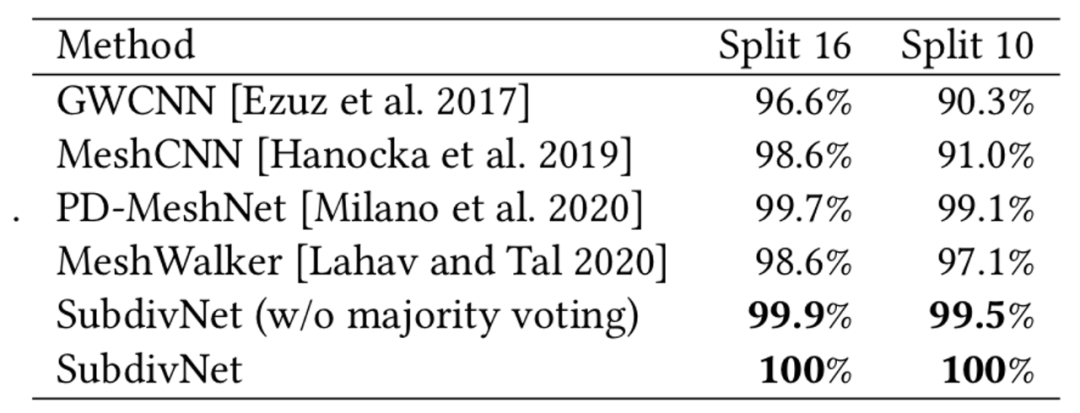
表2 在CubeEngraving数据集上的分类精度
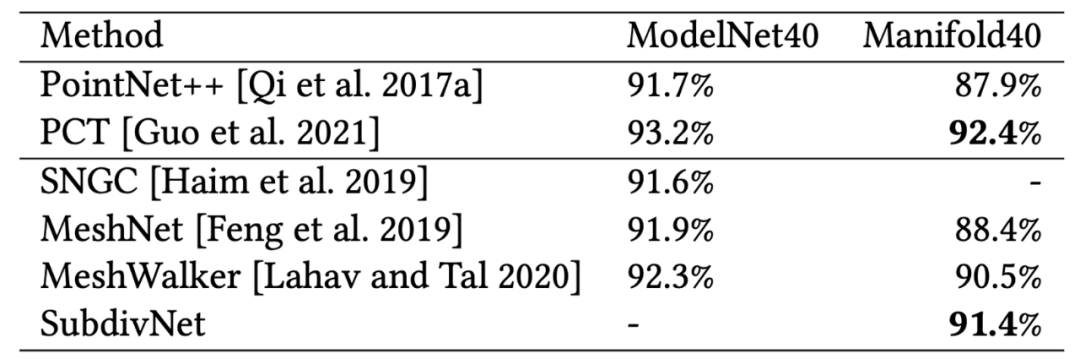
该方法还把 ModelNet40 中的模型修复为紧致流形,贡献了新的数据集Manifold40 。在此数据集上,SubdivNet也超过了以往的网格方法。表3给出ModelNet40和 Manifold40上的分类精度,其中前两行以位置和法向为输入的点云的最好结果,后三行是网格模型的结果。
表3 在Manifold40数据集上的分类精度
2. 网格分割
计图团队在人体分割数据集、COSEG数据集上进行了网格分割的实验。量化指标下,SubdivNet的分割准确率均高于对比的点云、网格方法。以下是分割结果展示。

图5 人体分割结果
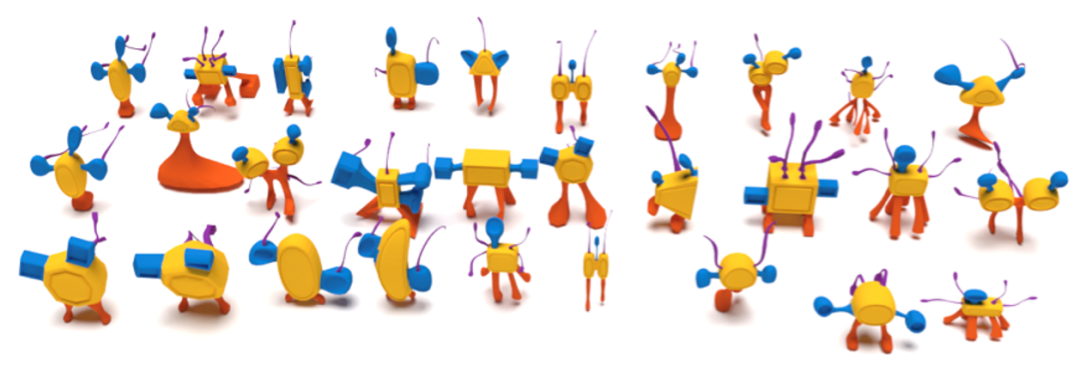
图6 COSEG 玩具分割结果
3. 形状对应
在量化的形状对应实验中,SubdivNet达到了SOTA水准。图6中,给定Source Mesh的点,寻找Target Mesh中与之对应点;相同的颜色表示对应关系。
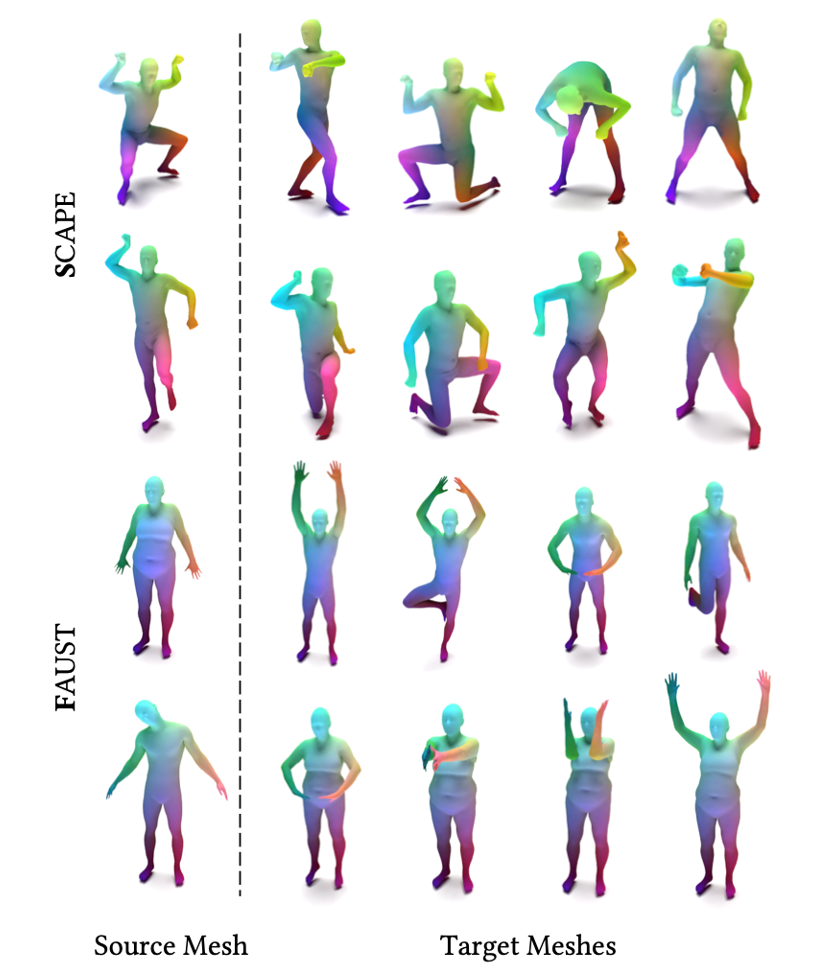
图7 形状对应可视化结果
四、网格检索
Jittor团队还利用RGBD相机扫描了真实场景,以点云为输入,在网格数据库中检索相似网格模型;以下为一些检索结果。
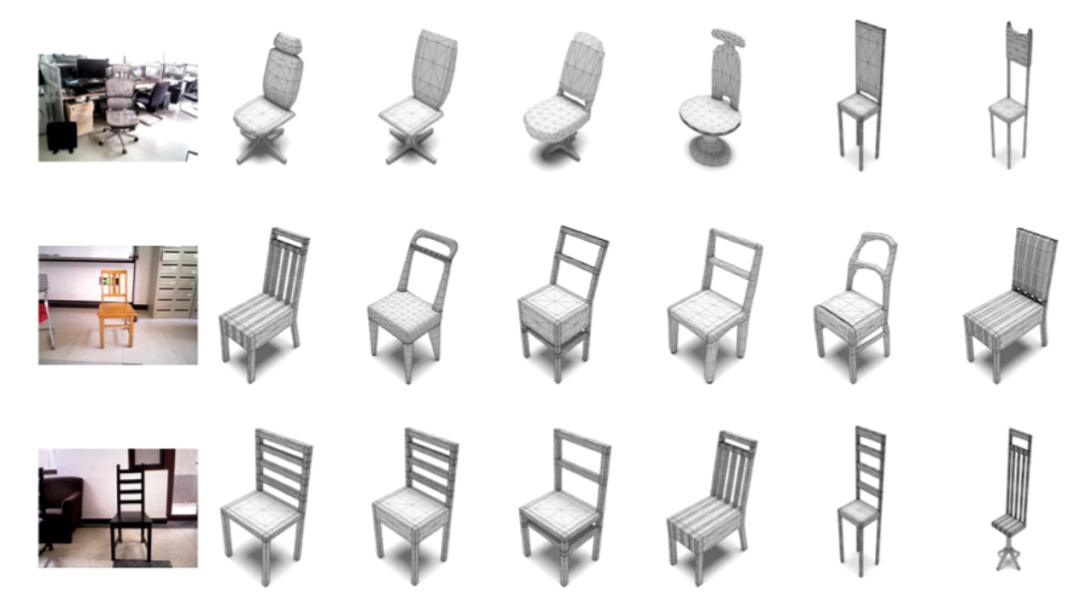
图8 从真实场景检索数据库中的三位网格模型
参考文献
- Shi-Min Hu, Zheng-Ning Liu, Meng-Hao Guo, Jun-Xiong Cai, Jiahui Huang, Tai-Jiang Mu, Ralph R. Martin, Subdivision-Based Mesh Convolution Networks, 2021, arXiv:2106.02285.
- Rana Hanocka, Amir Hertz, Noa Fish, Raja Giryes, Shachar Fleishman, Daniel Cohen-Or, Meshcnn: a network with an edge, ACM Transactions on Graphics, Vol. 38 No. 4, Article No. 90, 1-12.